Cảm biến là gì ?
Cảm biến (Sensor ) là thiết bị điện đo đạc các tín hiệu như nhiệt độ, áp suất, ánh sáng, tốc độ, những hiện tượng thay đổi bên ngoài chuyển thành tín hiệu điện tiêu chuẩn để cung cấp cho các bộ điều khiển phân tíchCấu tạo cảm biến
Hiện nay trên thị trường có hàng trăm ngàn cảm biến phục vụ các mục đích khác nhau, nhưng nó có mẫu số chung là được làm từ các sensor phần tử điện thay đổi tính chất theo sự biến đổi của môi trường gọi là đầu dò.
Cấu tạo gồm các phần tử mạch điện tạo thành một hệ thống hoàn chỉnh, được đóng gói nhỏ gọn trong một vỏ hộp. Các tín hiệu phát ra được quy chuẩn theo các mức điện áp, và dòng điện thông dụng nhất phù hợp với các bộ điều khiển.

Các loại cảm biến thông dụng
Mặc dù có hàng ngàn loại cảm biến khác nhau, nhưng thực tế khi chúng ta đi làm, thiết kế các máy móc, đặc biệt là ngành điện tự động hóa, chỉ có vài chục cảm biến công nghiệp thông dụng mà chúng ta dùng nhiều, thường thấy như cảm biến nhiệt độ, cảm biến quang, cảm biến áp suất, cảm biến tiện cận, cảm biến siêu âm, cảm biến độ ẩm vv. Đó là những sensor mà chúng ta thường thấy trên thị trường.
Cảm biến nhiệt độ
Nó được dùng để đo đạc nhiệt độ môi trường, nước,vv .Dưới đây là một hình ví dụ về cảm biến nhiệt độ công nghiệp.

Nó được bao bọc cẩn thận bằng lớp vỏ kim loại bên ngoài, rất công nghiệp, mục đích để đo sự thay đổi tín hiệu nhiệt độ từ môi trường sau đó cung cấp cho bộ điều khiển bằng tín hiệu điện
Cấu tạo

Gồm hai đây kim loại khác nhau được hàn lại xong bọc trong vỏ bảo vệ được gọi là đầu nóng, chính là nơi tiếp xúc với môi trường cần đo nhiệt độ. Còn một đầu được đấu dây ra phía ngoài cho bộ điều khiển được gọi là đầu lạnh.
Nguyên lý hoạt động của can nhiệt này là khi có sự thay đổi nhiệt độ môi trường cần đo dẫn đến thay đổi nhiệt độ của đầu nóng và đầu lạnh, sẽ xuất hiện hiệu điện thế ở đầu lạnh. Vậy tín hiệu thay đổi này sẽ cung cấp cho bộ điều khiển phân tích như plc.
Sự ổn định và dải sức điện động đo đạc phụ thuộc vào chất liệu đầu do nóng, do vậy nên mới có nhiều loại can nhiệt với tên gọi khác nhau như E, J, K, R vv. Tương ứng xuất ra các sức điện động khác nhau. Mục đích này để đa dạng hóa lựa chọn cảm biến nhiệt tương thích với bộ điều khiển khác nhau.
Thường thì cảm biến nhiệt độ được cấu tạo từ Platium có giá trị nhiệt độ là 100 ôm khi nhiệt độ là 0 độ C. Và khi nhiệt độ biến đổi thì điện trở cũng tỷ lệ biến đổi theo.
Mộ lưu ý để sử dụng can nhiệt là phải cung cấp một nguồn điện đúng như thông số và ổn định liên tục. Đầu cảm biến này được bọc trong vỏ bằng kim loại đồng, sứ dẫn nhiệt hay thủy tinh để bảo vệ đầu dò.

Thực tế cảm biến này còn có một bộ chuyển đổi tín hiệu và bù nhiễu đằng sau đó để bù sai số và tạo ra tín hiệu đo chuẩn và không giao động, hiệu suất làm việc cao và dễ lắp đặt. Và để hợp thành bộ hoàn chỉnh phải kết hợp với đồng hồ đo nhiệt độ để lưu lại các thông số và hiển thị cho người sử dụng.
Cảm biến độ ẩm
Cảm biến độ ẩm (humidity sensor) cảm nhận, đo lường và báo cáo độ ẩm tương đối trong không khí. Do đó nó đo cả nhiệt độ ẩm và không khí. Độ ẩm tương đối là tỷ lệ của độ ẩm thực tế trong không khí đến mức độ ẩm cao nhất có thể giữ được ở nhiệt độ không khí đó. Nhiệt độ không khí càng ấm thì độ ẩm càng cao. Bộ cảm biến độ ẩm/sương sử dụng phép đo điện dung, dựa vào điện dung. Điện năng là khả năng của hai dây dẫn điện gần đó để tạo ra một điện trường giữa chúng. Bộ cảm biến bao gồm hai tấm kim loại và chứa một màng polyme không dẫn điện giữa chúng. Bộ phim này thu thập độ ẩm từ không khí, làm cho điện áp giữa hai tấm thay đổi. Những thay đổi điện áp này được chuyển đổi thành các số liệu kỹ thuật số hiển thị mức độ ẩm trong không khí.

Ứng dụng của cảm biến độ ẩm
Bộ cảm biến độ ẩm có thể được sử dụng như một biện pháp giám sát và phòng ngừa trong nhà cho những người bị bệnh mà bị ảnh hưởng bởi độ ẩm. Chúng cũng được tìm thấy trong hệ thống sưởi ấm, thông gió và điều hòa không khí tại gia (hệ thống HVAC). Chúng cũng có thể được tìm thấy trong các văn phòng, ô tô, máy giữ ẩm, bảo tàng, không gian công nghiệp và nhà kính và có thể được sử dụng trong các trạm khí tượng để báo cáo và dự báo thời tiết. Cảm biến sương được sử dụng trong ngành công nghiệp sơn vì việc sơn phủ có thể rất nhạy với điểm sương. Cảm biến quang

Cảm biến quang ( Photoelectric Sensor ) là được cấu tạo bởi linh kiện bán dẫn quang điện, khi có anh sáng chiếu vào bề mặt bán dẫn sẽ thay đổi tính chất của light sensor . Tín hiệu quang này được chuyển đổi sang tín hiệu điện quy chuẩn thông qua một bảng mạch điện tử, nhờ hiện tượng phát xạ điện tử ở cực catot.
Thưởng thì cảm biến quang có một đầu thu và phát tín hiệu quang, và được chia làm nhiều loại theo nguyên lý làm việc.
Loại cảm biến quang thu phát gồm một bộ phát ánh sáng như hồng ngoại, laze vv. Và bộ thu là sensor quang rất nhạy, để chuyển đổi tính hiệu quang sang tín hiệu điện
Cảm biến quang phản xạ gương tức là nó thu phát và nhận tín hiệu qua chiếc gương được đặt đối diện, nguyên lý là nếu không có vật chạy qua thì tín hiệu từ đầu phát sẽ phản xạ lại vào đầu thu. Tín hiệu thường xuất ra NPN or PNP

Ưu điểm của loại cảm biến quang phản xạ gương này là phát hiện vật rất xa cho với cảm biến quang thu phát thông thường, hay cảm biến quang độc lập . Tiết kiện chi phí lắp đặt, kinh phí đầu tư vv

Trên hình là sơ đồ kết nối Optical sensor reflects the mirror gồm 3 đầu ra, dây xanh kết nối nguồn âm, dây nâu kết nối nguồn dương, dây đen là ngõ ra output dạng tín hiệu.
Cảm biến quang dạng khuếch tán.
Về thiết bị cảm biến quang điện này có nhiều nhà cung cấp tên tuổi, điển hình là cảm biến quang omron .
Các sản phẩm tiêu biểu như cảm biến sợi quang omron, cảm biến quang thu phát chung omron, hay mã hàng cảm biến quang omron e3z, chúng ta có thể tham khảo bảng giá cảm biến quang omron trên trang web : http://www.omron.com.vn/.của họ
Hay của hãng autonics, eyence, panasonic
Thường được dùng cho các máy dây chuyển đếm sản phẩm, đếm hàng hóa chạy trên các băng tải, vvv. rất phổ biến trong môi trường công nghiệp.

Cảm biến áp suất

Cảm biến áp suất dùng để đo áp suất trong các bình hơi, thiết bị khí nén trong công nghiệp, chuyển áp lực hơi thành tín hiệu điện, dòng điện với các định mức quy chuẩn công nghiệp 4-20mA và 0-20mA theo dòng điện hoặc 0-10V hay 0.5-4.5V 1-5V theo mức điện áp.
Thường gặp nhiều trong các máy sử dụng cơ cấu khí nén, ngoài ra nó còn được đo áp suất nước , cảm biến áp suất không khí, đo áp suất hơi , cảm biến áp suất khí nạp, cảm biến áp suất lốp xe hơi rất thông dụng
Như chúng ta đã biết áp suất định nghĩa là áp lực của chất lỏng hoặc khí lên một đơn vị diện tích. P=F/A, trong đó F là lực tác động với đơn vi là Newton (N), A là diện tích m2. Vây P sẽ có đơn vị là N/m2 hay Pascal.
Trên thị trường hiện nay cảm biến áp suất được chia làm ba loại.
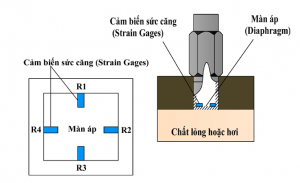
Cảm biến áp suất dạng cầu ( Strain gage based )
Cảm biến áp suất biến dung (Variable capacitance)
Áp cảm biến suất ( Piezoelectric)
Trong tất cả, dạng cầu là phổ biến nhất, nguyên lý là khi có áp lực tác động lên làm thay đổi điện trở dẫn đến điện áp thay đổi (mV) và có thể chuyển đổi sang mA qua bộ khuếch đại thích hợp. Ưu điểm của Wheatstone sensor có độ chính xác, tuổi thọ cao và giá thành sản xuất thấp.

Cảm biến tiệm cận
Cảm biến tiệm cận ( Proximity Sensors ) được sử dụng rất nhiều trong máy móc công nghiệp, đặc biệt trong các dây chuyền sản xuất đếm và phân loại sản phẩm. Với chức năng phát hiện vật di chuyển qua đầu cảm biến chuyển đổi thành tín hiệu điện cho bộ điều khiển.

Hình trên là một ví dụ cảm biến tiện cận mà chúng ta thường thấy. Nó được chia làm hai loại chính.
Cảm biến phát tra trường điện từ dùng để phát hiện ra vật bằng kim loại, nó gồm cuộn copper coil ở đầu cảm ứng. Một mạch điện điều khiển phát ra sóng cao tần móc vòng với cuộn dây tạo ra trường điện từ dao động quanh nó. Khi vật bằng kim loại lướt qua, làm dao động dòng điện trong cuộn dây giảm đi, tín hiệu đầu ra sẽ thay đổi trang thái. Cảm biến này có ưu điểm hơn nhiều so với cảm biến quang bởi đặc tính chống chịu dầu mỡ, hoạt động trong môi trường bụi bẩn.

Vậy các bạn thắc những cảm biến không phải bằng kim loại thì dùng loại nào. Thực tế nhà sản xuất cũng cho ra đời loại tưởng tự vậy nó dựa trên nguyên lý phát trường điện dung ở đầu dò, giá trị phụ thuộc vào chất liệu vật và khoảng cách, hiểu nôm na đầu cảm biến và vật là hai bản cực của chiếc tụ. Khi có sự thay đổi thì tín hiệu điện được xuất ra đầu dây thông qua bộ chuyển đổi.
Cảm biến áp suất dùng để đo áp suất trong các bình hơi, thiết bị khí nén trong công nghiệp, chuyển áp lực hơi thành tín hiệu điện, dòng điện với các định mức quy chuẩn công nghiệp 4-20mA và 0-20mA theo dòng điện hoặc 0-10V hay 0.5-4.5V 1-5V theo mức điện áp.
Thường gặp nhiều trong các máy sử dụng cơ cấu khí nén, ngoài ra nó còn được đo áp suất nước , cảm biến áp suất không khí, đo áp suất hơi , cảm biến áp suất khí nạp, cảm biến áp suất lốp xe hơi rất thông dụng
Như chúng ta đã biết áp suất định nghĩa là áp lực của chất lỏng hoặc khí lên một đơn vị diện tích. P=F/A, trong đó F là lực tác động với đơn vi là Newton (N), A là diện tích m2. Vây P sẽ có đơn vị là N/m2 hay Pascal.
Trên thị trường hiện nay cảm biến áp suất được chia làm ba loại.
Cảm biến áp suất dạng cầu ( Strain gage based )
Cảm biến áp suất biến dung (Variable capacitance)
Áp cảm biến suất ( Piezoelectric)
Trong tất cả, dạng cầu là phổ biến nhất, nguyên lý là khi có áp lực tác động lên làm thay đổi điện trở dẫn đến điện áp thay đổi (mV) và có thể chuyển đổi sang mA qua bộ khuếch đại thích hợp. Ưu điểm của Wheatstone sensor có độ chính xác, tuổi thọ cao và giá thành sản xuất thấp.
Cảm biến tiệm cận
Cảm biến tiệm cận ( Proximity Sensors ) được sử dụng rất nhiều trong máy móc công nghiệp, đặc biệt trong các dây chuyền sản xuất đếm và phân loại sản phẩm. Với chức năng phát hiện vật di chuyển qua đầu cảm biến chuyển đổi thành tín hiệu điện cho bộ điều khiển.
Hình trên là một ví dụ cảm biến tiện cận mà chúng ta thường thấy. Nó được chia làm hai loại chính.
Cảm biến phát tra trường điện từ dùng để phát hiện ra vật bằng kim loại, nó gồm cuộn copper coil ở đầu cảm ứng. Một mạch điện điều khiển phát ra sóng cao tần móc vòng với cuộn dây tạo ra trường điện từ dao động quanh nó. Khi vật bằng kim loại lướt qua, làm dao động dòng điện trong cuộn dây giảm đi, tín hiệu đầu ra sẽ thay đổi trang thái. Cảm biến này có ưu điểm hơn nhiều so với cảm biến quang bởi đặc tính chống chịu dầu mỡ, hoạt động trong môi trường bụi bẩn.
Vậy các bạn thắc những cảm biến không phải bằng kim loại thì dùng loại nào. Thực tế nhà sản xuất cũng cho ra đời loại tưởng tự vậy nó dựa trên nguyên lý phát trường điện dung ở đầu dò, giá trị phụ thuộc vào chất liệu vật và khoảng cách, hiểu nôm na đầu cảm biến và vật là hai bản cực của chiếc tụ. Khi có sự thay đổi thì tín hiệu điện được xuất ra đầu dây thông qua bộ chuyển đổi.
Lưu ý khi chọn các loại cảm biến
Đầu tiên phải xác định đặc tính của máy, ứng dụng trong sản xuất mặt hàng gì, môi trường làm việc và yêu cầu độ tin cậy làm việc để lựa chọn cho phù hợp.
Trên đây là các loại cảm biến thông dụng được sử dụng rất nhiều trong công nghiệp, các bạn tham khảo
Đầu tiên phải xác định đặc tính của máy, ứng dụng trong sản xuất mặt hàng gì, môi trường làm việc và yêu cầu độ tin cậy làm việc để lựa chọn cho phù hợp.


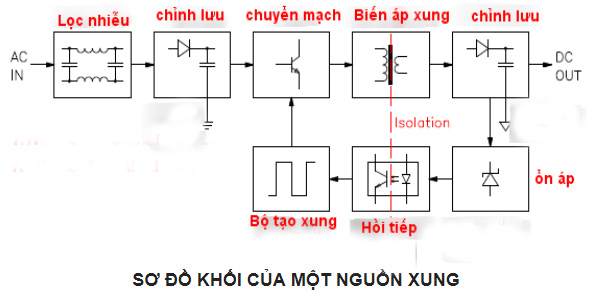
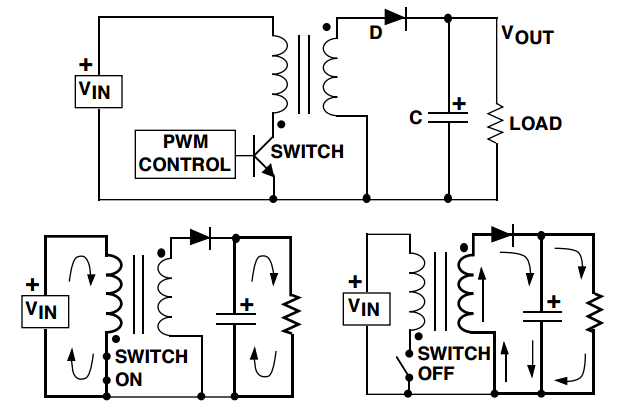
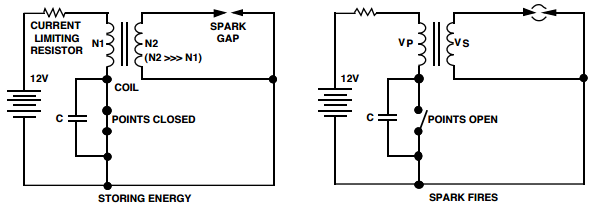 Sơ đồ nguyên lý như trên. Cuộn dây N2 có số vòng lớn hơn rất nhiều so với N1. Khi công tắc (points closed - chính là nút bấm khởi động) đóng, điện áp qua N1 là 12V, dòng qua N1 là dòng một chiều (giá trị bằng dòng qua trở hạn dòng) nên không có hiện tượng cảm ứng từ.
Sơ đồ nguyên lý như trên. Cuộn dây N2 có số vòng lớn hơn rất nhiều so với N1. Khi công tắc (points closed - chính là nút bấm khởi động) đóng, điện áp qua N1 là 12V, dòng qua N1 là dòng một chiều (giá trị bằng dòng qua trở hạn dòng) nên không có hiện tượng cảm ứng từ.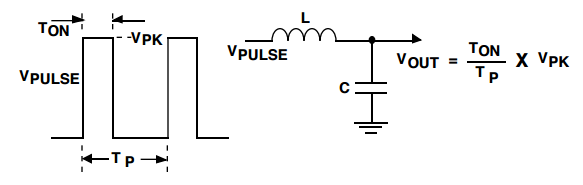 - Điện áp ở dạng xung vuông với chu kỳ Tp, độ rộng Ton chính là thời gian xung ở điện áp đỉnh Vpk (Ton<=Tp). Xung vuông này sau khi cho qua mạch lọc LC sẽ bị san phẳng thành điện áp một chiều có giá trị Vout như hình vẽ. Ta có thể điều chỉnh điện áp Vout theo ý mình bằng cách điều chỉnh độ rộng xung Ton, Ton càng lớn thì Vout càng lớn và ngược lại. Đây chính là nguyên lý hoạt động chung của các loại nguồn xung.
- Điện áp ở dạng xung vuông với chu kỳ Tp, độ rộng Ton chính là thời gian xung ở điện áp đỉnh Vpk (Ton<=Tp). Xung vuông này sau khi cho qua mạch lọc LC sẽ bị san phẳng thành điện áp một chiều có giá trị Vout như hình vẽ. Ta có thể điều chỉnh điện áp Vout theo ý mình bằng cách điều chỉnh độ rộng xung Ton, Ton càng lớn thì Vout càng lớn và ngược lại. Đây chính là nguyên lý hoạt động chung của các loại nguồn xung.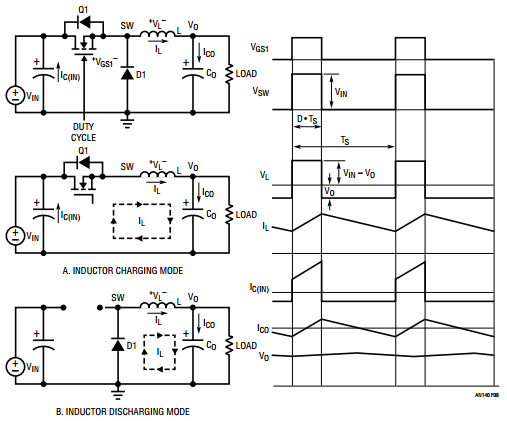 - Hai hình bên dưới mô tả hoạt động của mạch ở 2 trạng thái nạp và xả của cuộn dây. Ta sẽ tính dòng qua điện trở LOAD (tải) ở hai trạng thái.
- Hai hình bên dưới mô tả hoạt động của mạch ở 2 trạng thái nạp và xả của cuộn dây. Ta sẽ tính dòng qua điện trở LOAD (tải) ở hai trạng thái.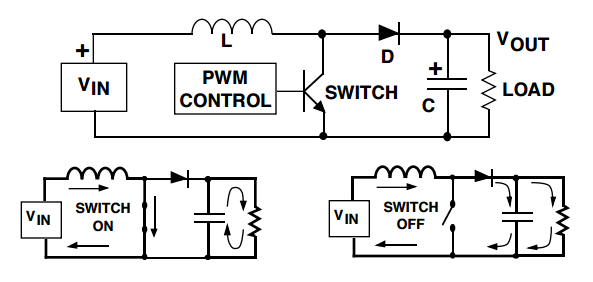
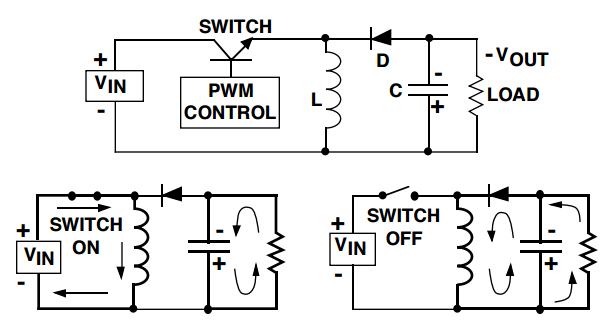
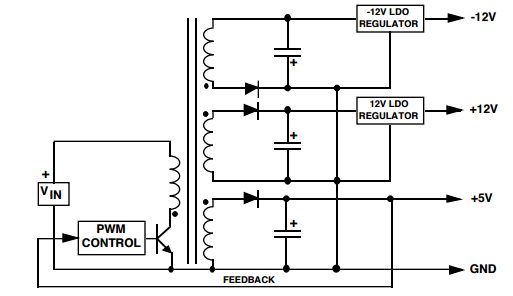 - Đây là sơ đồ của một mạch flyback với 3 mức điện áp đầu ra, có cả điện áp âm. Muốn tạo điện áp âm rất đơn giản ta chỉ cần đảo chiều cực tính của cuộn dây, đảo chiều tụ đầu ra như hình trên.
- Đây là sơ đồ của một mạch flyback với 3 mức điện áp đầu ra, có cả điện áp âm. Muốn tạo điện áp âm rất đơn giản ta chỉ cần đảo chiều cực tính của cuộn dây, đảo chiều tụ đầu ra như hình trên.